Quadrocopter
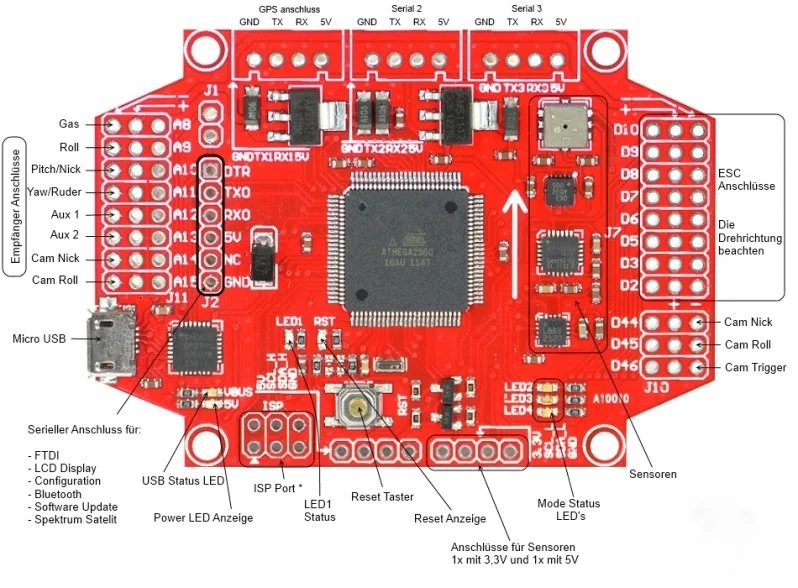
Das erste Mal, als mir ein Quadrocopter in die Quere kam, war ca. 2012. Ich war mit meinem Vater unterwegs auf der Lichtwiese wo Informatikstudenten im Schutz der Bäume ihre Roboterdrohnen testeten und anpassten. Ich war unmittelbar fasziniert von der Flugstabilität der Flugsysteme. Die scheinbare Einfachheit des Prinzips vier Elektro Motoren nach oben zu richten und mit unterschiedlichen Drehrichtungen hohe Stabilität zu erzeugen gefiel mir. Die Computerchipstockwerke, mit denen die Motoren verbunden waren, ließen erahnen, dass es vielleicht ein doch nicht so einfaches System ist. Ab diesem Zeitpunkt wollte ich mir einen eigenen Quadrocopter bauen. Ich begann kurze Zeit später mit der Recherche und fand ein paar Seiten die unterschiedliche Flugcomputerboards verwendeten, die wiederum komplett unterschiedliche Codes besaßen und anders zu programmieren waren. Ich fand eine MultiWiibasierte Anleitung, die mir gut gefiel. Dort wurde nicht einfach ein Modell vorgestellt, welches man nachbauen könne, sondern die Dinge wurden so erklärt, dass man danach ungefähr wusste, wie was funktionierte, was wiederum die Möglichkeiten eröffnete, eigene Drohnenprojekte mit eigenen Anpassungen zu konstruieren. Wenn man dasselbe FlightBoard mit den gleichen Sensoren benutzen wollte, gab es nur einmal eine gründliche Codeanpassung, konnte aber dann bei dem nächsten Projekt mit kleinen Anpassungen den Code weiterverwenden. Würde ich also erfolgreich einen Quadrocoptercode anpassen, könnte ich direkt das nächste Projekt eines größeren Flugsystems bauen, um zum Beispiel eine große Kamera mit 3-Axen-Gimbal zu heben. Ich kaufte mir die Anleitung und begann mich einzulesen. Ich kaufte als erstes einer der größten Flug-Computerchips, dass MultiWii Mega 2560 Pro Board.
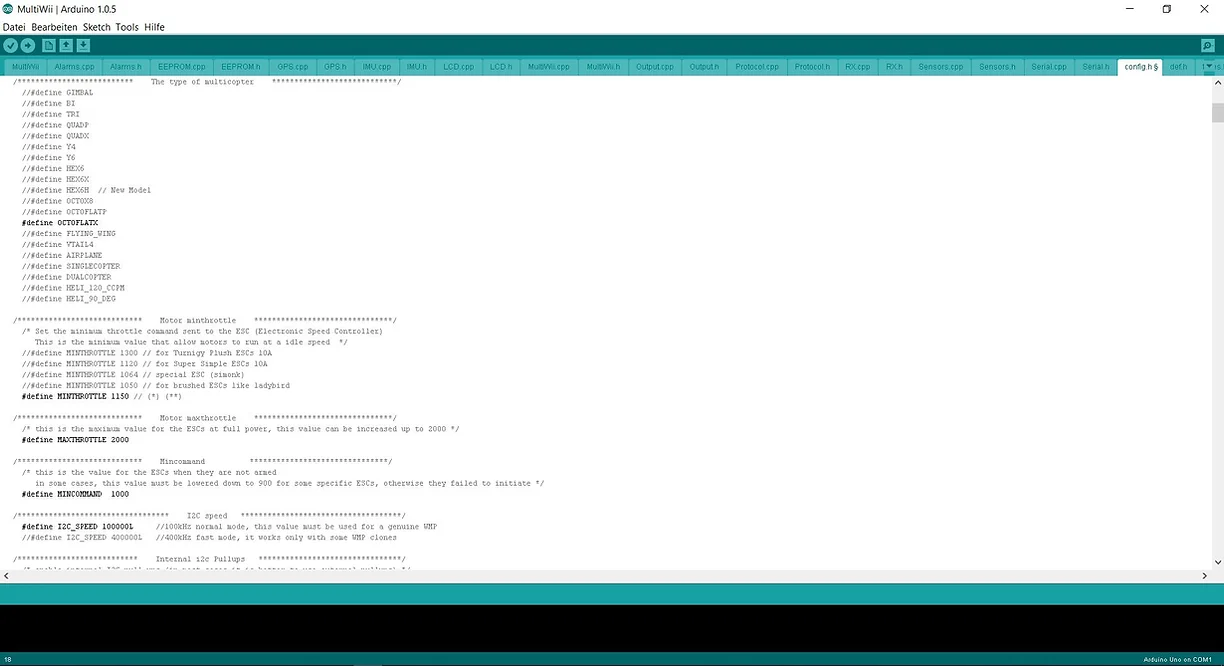
Es läuft mit einem arduinogestützen Code. Der MultiWiivorprogrammierte Code ist schon sehr umfangreich und lässt viele Möglichkeiten zu. Es ist aber eine gewisse Grundkenntnis nötig, um zu verstehen, dass man zum Beispiel den COM (USB Anschluss) definieren muss, (an dem das Board angeschlossen ist). Weiter geht es mit der Baudrate, mit der der Laptop mit dem MultiWiiboard kommuniziert. Wenn man dann nach vielen ausprobieren, manchmal auch eher mit Zufall, die richtige Einstellung findet und endlich kein Fehlercode mehr auftaucht, wenn man versucht seinen Code auf das Board zu laden, dann ist das schon ein gutes Gefühl von Erfolg.
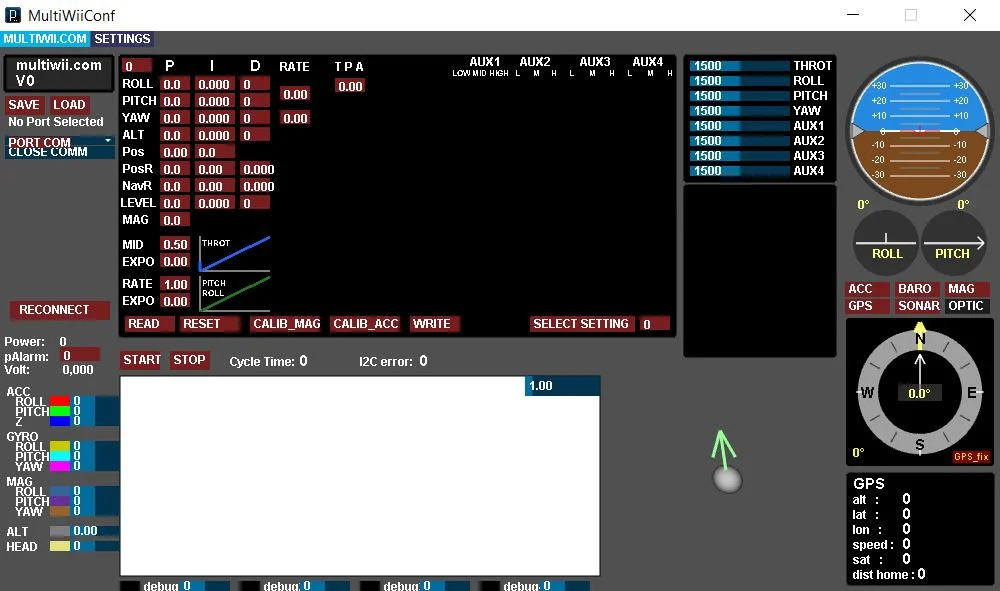
Endlich kann man das MultiWiiprogramm starten, welches eine Grafik besitzt. Man sieht alle Sensoren ausschlagen und sich so bewegen, wie man das Board bewegt. Ich hatte von HobbyKing (Vorsicht Schleichwerbung) alle Teile bestellt die ich für das Vorhaben brauchte: Die Fernsteuerung Turnigy 9X, 4 Brushless Motoren, 4 ESC Regler mit 30 Ampere, 2 LiPo Akkus und einen Quadrocopterrahmen.
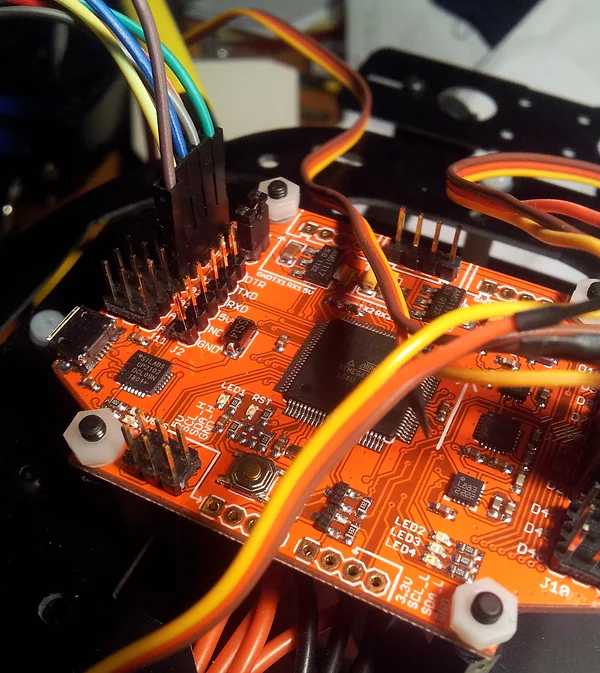
Nachdem ich mit meinem Vater die Teile beim Zoll abholte, und er einen Kommentar gemacht hatte, dass er gar nicht mehr bei den vielen Bauteilen durchblicke, die ich verbaue, ging es mit der Hardwareinstallation (Löten, verkabeln, stecken und verkleben) los. Im Gegensatz zu der Softwareanpasung sieht man hier endlich schnelle Ergebnisse von dem, was man da eigentlich konstrueirt.




Ein erhebendes Gefühl, als sich zum ersten Mal alle Propeller drehten durch das MultiWiiBoard angesteuert. Ich konnte mein Glück kaum fassen, da es vorher so viele Probleme gab, wie alleine schon der Standardausschlag einer Fernsteuerung von 1150 bis 1850 geht, der nicht ausreicht für das FlightBoard. Obwohl also schon alles funktionieren sollte, funktionierte aus diesem Grund gar nichts, außer dass ich auf dem Bildschirm sehen konnte, wie ich die Fernsteuerungssticks richtig bewege, um zu starten (ARM), die Software dazu aber nicht reagierte. Irgendwann habe ich dann verstanden woran es liegt, habe den Ausschlag auf 1000 bis 2000 gestellt und kam zu dem großen Erfolgsgefühl, durch drehende Motoren ausgelöst.
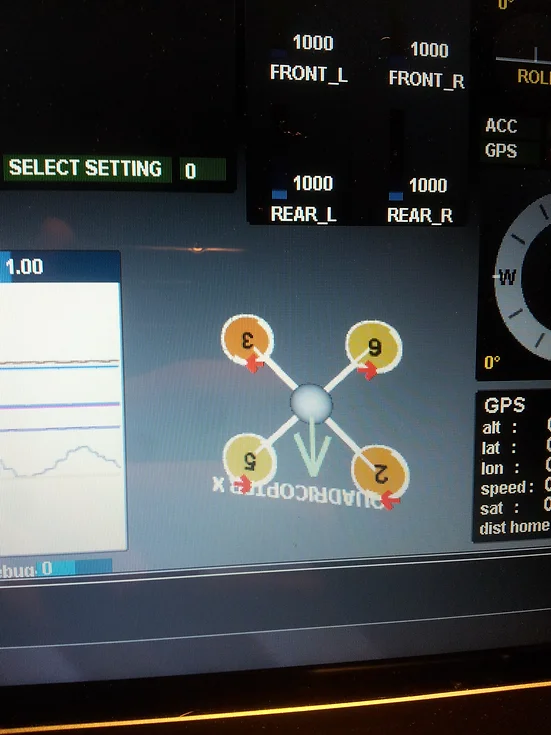
Nach Verpolung der Kabel, damit sich alle Motoren so drehen wie sie drehen sollen (links vorne und rechts hinten im Uhrzeigersinn, rechts vorne und links hinten gegen den Uhrzeigersinn), konnte ich die Propeller installieren. Jetzt ging es an die Anpassungen der PID-Werte.
Die PID Werte sind ein eigenes kompliziertes Thema für sich, die ich bis heute noch nicht komplett durchdrungen habe. Nun kamen Probeflüge mit anschließenden Anpassungen der Flugeigenschaften. Es kam noch ein GPS Modul und ein Bluetooth Modul dazu, das ermöglichte den Kompass zu kalibrieren und Einstellungen direkt vor Ort mit dem Smartphone vorzunehmen. Über das GPS Modul konnte ich zum Beispiel PositionHoldFunktionen oder FlyBackToHomeFunktionen nutzen.
Endlich flog meine Drohne, und das gar nicht mal schlecht. Es machte wirklich Spaß damit zu fliegen. Ich bestellte mir noch ein kleines günstiges 2- Achsen- Gimbal das für eine GoPro gemacht war. Die verschieden Achsen wurden von Servomotoren angetrieben. Ich hatte damit vor, schöne Luftaufnahmen zu machen, weswegen ich mir eine GoPro Hero 3+ BlackEdition kaufte.
Eines schönen Tages ging ich mit meinem Vater und der neuen Drohne (mit GoPro) auf die Lichtwiese. Ich flog die Drohne und es funktionierte alles wunderbar. Plötzlich hatte ich aber keine Kontrolle mehr über die Drohne. Sie war in dem Moment in ca. 13 Meter Höhe und driftete Richtung Wald davon. Ich hantierte wild mit der Fernsteuerung, aber als nichts half, rannte ich der Drohne in den Wald hinterher. Schnell hatte ich sie verloren, denn sie flog mit etwa 12 Km/h (Tendenz schneller werdend) über den Baumkronen davon.
Ich habe danach Suchtrupps mit Freunden gestartet und mehrer Tage vergeblich die Drohne gesucht. Ich würde zu gerne den Film von der GoPro sehen, wo ich wie wild versuche der Drohne hinterher zu rennen.
Wenn sie nicht gestorben ist, dann fliegt sie auch noch heute.
Da ich die Drohne nie gefunden habe, ist es schwer den Fehler der dazu führte ausfindig zu machen. Es gib mehrere potenzielle Faktoren, die mehr oder weniger wahrscheinlich sind:
1. Durch eine kurze Störung der Verbindung zwischen Fernsteuerung und Empfänger, wird der FailSafeCode aktiviert. Der Copter dreht mit der eingestellten Drehzahl der FailsafeEinstellung und kommt normalerweise dabei langsam zum Boden. Da dieser Wert zu hoch eingestellt ist für das Abfluggewicht an dem Tag, geht der Copter nicht zu Boden, sondern fliegt weiter. Die aktivierte FailSafeEinstellung wird trotz eines funktionierenden Signals der Fernsteuerung beibehalten, der dann zu dem dauerhaften Kontrollverlust und zum Wegdriften über den Wipfel führt.
Was spricht dagegen?
Die Drehzahl der FailSafe war zu einer hohen Wahrscheinlichkeit auf die Drohne richtig eingestellt, sogar ohne Kamera und MiniGimbal. Das zusätzliche Gewicht hätte außerdem die Drohne noch schneller runtergebracht.
Sobald die Fernsteuerung wieder ein Signal ausgäbe, würde der FailSafeCode wieder inaktiv.
2. Mein Signal von der Fernsteuerung zu dem Empfänger ist gestört oder überlagert von einer stärkeren Signalquelle, die zu dem Fehler führt, so dass der letzte übermittelte Stickausschlag der Fernsteuerung immer weiter ausgeführt wird.
3. Ein Fehler im MultiWii Board führt wie bei der zweiten These dazu, dass der letzte übermittelte Stickausschlag der Fernsteuerung immer weiter ausgeführt wird.
4. Kleine Alliens besiedeln meine fliegende Drohne und programmieren eine neue Flugroute ein, da meine Signale ihr durchsichtiges Flugschiff stört. Sie interessieren sich nicht für Eigentum, sondern nehmen sich, was sie brauchen. In diesem Fall meine Drohne.