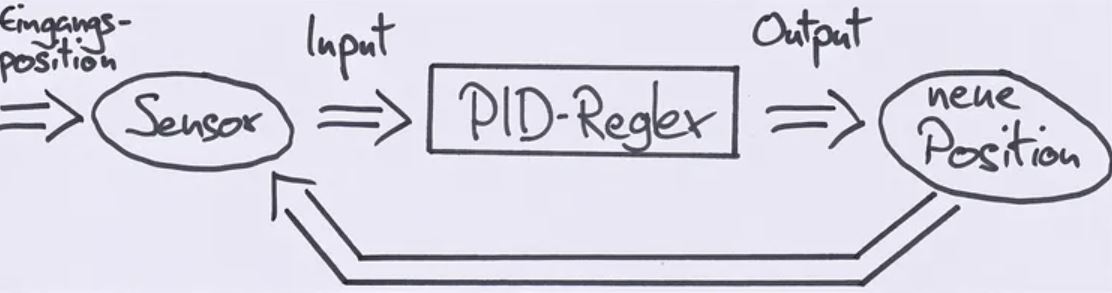
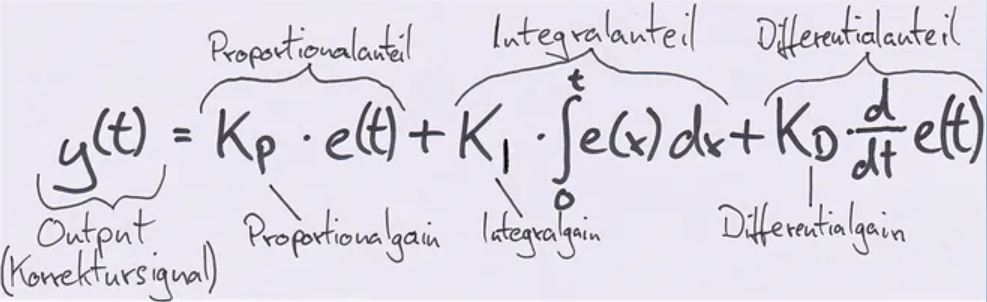
PID-Werte
Proportionalanteil - Integralanteil - Differentialanteil
Der P-Regler (auch Gain-Wert genannt), ist der wichtigste Regler der drei Werten. Die Regelung erfolgt proportional zu den Sensordaten. Ist der Wert zu gering eingestellt, kann die Drohnen nicht stabil fliegen, da der Regler nicht stark genug eingreift. Die Drohne liegt sehr träge in der Luft was auch über Motorengeräusche hörbar wird. Ist der P-Wert zu hoch eingestellt, fängt der Copter an zu oszillieren, da die Drohne bei kleinsten Lageänderungen zu stark gegensteuert. Ein extrem hoher P-Wert würde die Motoren viele male pro Sekunde jeweils komplett an (volle Drehzahl) und aus (keine Drehzahl) schalten was zu einem unsteuerbaren instabilen Flug führt. Um den Werte gut einzustellen, sollte der Copter im Flugzustand gehalten werden. Der P-Wert wird immer weiter erhöht bis der Copter anfängt zu oszillieren. Dann wird der Wert auf ca. 50% des ermittelten Grenzwertes eingestellt. Der P-Wert sollte eher zu niedrig eingestellt werden als zu hoch, um gut fliegen zu können.
Der D-Wert ("derivative", auf deutsch "Ableitung") ist für schnelle Korrekturen notwendig. Je stärker die Signalveränderung (je schneller die Veränderungsgeschwindigkeit des Signals) ist, desto stärker greift der D-Regler ein. Bei einer Windböhe wird die Drohne erst leicht, dann schneller zu einer Seite gedreht. Der D-Regler wird also erst leicht, dann stark aktiviert, was zu einer Leistungssteigerung führt um den Copter wieder in die richtige Position zurück zu holen. Ist der D-Wert zu hoch eingestellt, fängt der Copter an schnell zu oszillieren. Ist der D-Wert zu niedrig, reagiert die Drohne nicht auf schnelle Änderungen. Um den Wert gut einzustellen wird der D-Wert immer weiter herhöht, bis der Copter anfängt zu oszillieren und Störsignale zu verstärken, hörbar durch ein leises zwitschern der Motoren (hoher Energieverbrauch). Von dem ermittelte D-Wert ca. 50% einstellen.
Der I-Regler ("Integral") Verändert fortlaufend die Leistung in Abhängigkeit des Auslenkwinkels und der Zeit. Der I-Regler ist also für Korrekturen notwendig wenn trotz optimal eingestellter P- und D-Werte die Drohne nicht gerade in der Luft fliegt zum Beispiel aufgrund eines nicht optimalen Schwerpunktes. Ist die Drohne durch ein Zusatzgewicht rechts schwerer als links, kippt sie ab und würde mit dem P und D-Regler schief bleiben. Der I-Regler gleicht die Schräglage langsam mit einer Leistungserhöhung an den richtigen Motoren bis in die waagerechte aus. Wie stark die Leistungserhöhung ist, bestimmt der I-Wert. Dieser Wert sollte normalerweise relativ nahe bei Null bleiben. Der I-Wert sollte, bei einem guten Flugobjekt welches im Schwerpunkt ist und eine gute Aerodynamik besitzt, nahe Null liegen. Ist der Wert zu hoch eingestellt, beginnt die Drohne zu oszillieren.