Octocopter
Nach dem Vorfall mit dem Quadrocopter hatte ich trotzdem nicht genug mit den Drohnen. Ich fotografierte sehr gerne und hatte mir relativ frisch eine Canon 700D gekauft. Ich wollte eine neue Drohne bauen, welche meine Canon 700D mit einem großen Gimbal heben könnte.



Wie vieles startete das Projekt erst auf dem Papier. Mein Vater warnte mich noch, dass die Zukunft nicht darin liege große Copter zu bauen, sondern so kompakt wie möglich mit einer kleinen guten Kamera. Ich war trozdem von einem großen Copter überzeugt, da ich professionelle Luftbilder machen wollte. Nach den Skizzen und Vorplanungen ging es los mit der HobbyKing Bestellungen. Ich kaufte 8x 1136 Watt 500 kV Brushless Motoren, 8x 60 Ampere ESC´s, 10x 5 Ampere 11,1 Volt LiPo Batterien. Während der Wartezeit auf die bestellten Proukte, baute ich einen Aluminiumrahmen aus vier 2x1x100 cm Alu-Profilen und einem Alu-Blech. Die Bauteile wurden mit zwei Komponentenkleber und Schrauben zu meinem Ocotcopterrahmen.



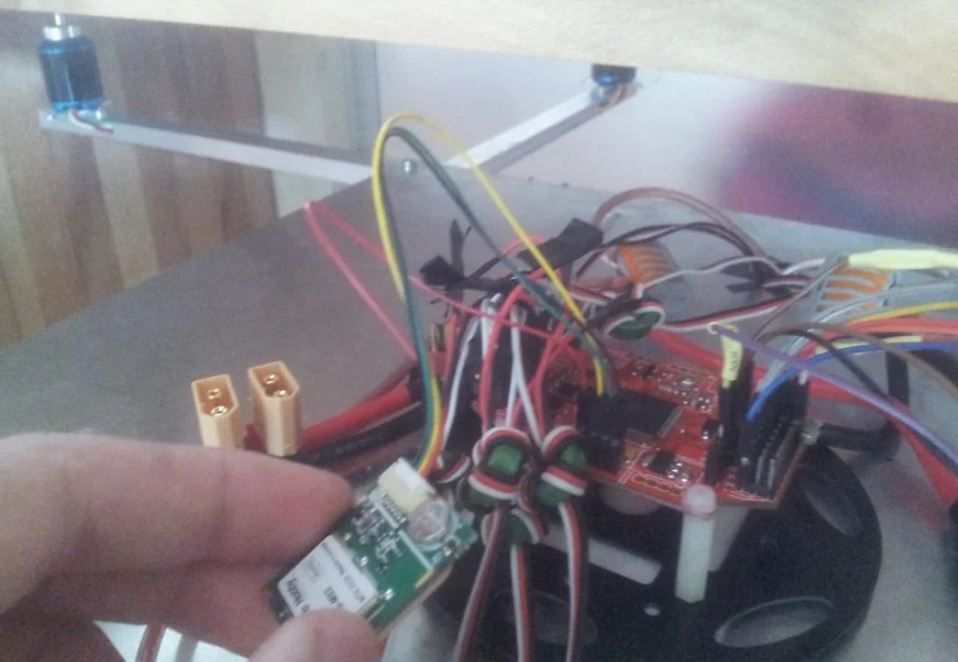
Kurz nach dem Zoll Besuch, lagen alle bestellten Teile mit dem fertigen Rahmen auf dem großen Esstisch von meinem Vater, wo ich mich ausbreitete. Ich verlegte die Kabel in den Alu-Profilen (was viel Lötarbeit war), setzte die ESC´s von unten auf die Drohne und ließ dann durch zwei Löcher im Blech die Anstereungskabel zu dem MultiWii Board laufen.


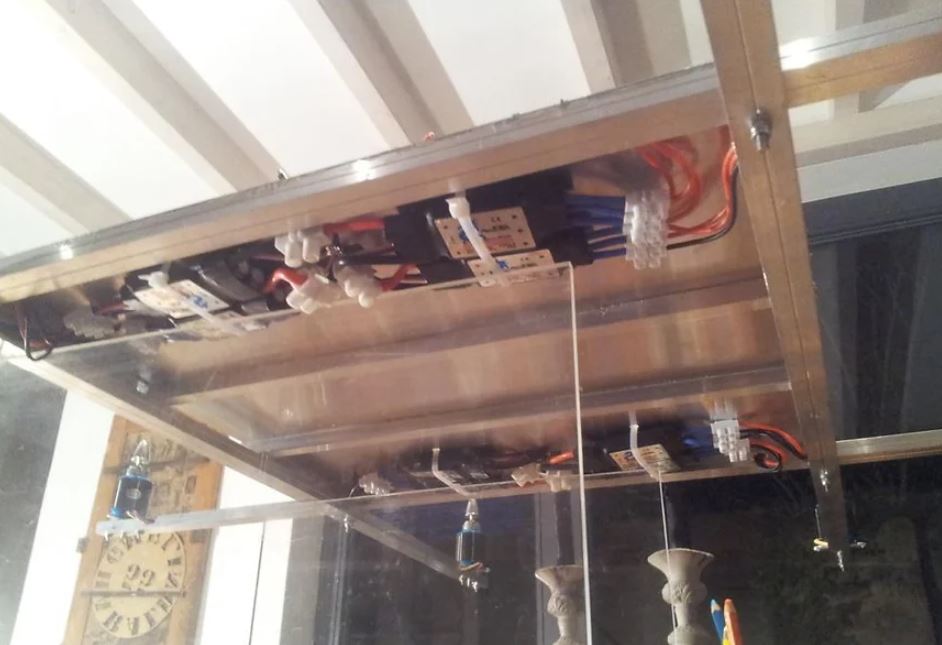




Die Akkus hatten gerade noch so Platz (schräg auf der Drohnenoberseite), dass die Abdeckungsschutzhaube noch darauf passte. Dabei handelte es sich um einen Stirodurviereck mit einer verklebten Plexiglasabdeckung.




Der MultiWii Code wurde vom Quadrocopter übernommen und an den Octocopter angepasst. Dann wurde noch ein LED Streifen installiert, der Hardware bedingt so installiert war, dass bei egal welcher Farbe immer zwei unterschiedliche Farben (vorne und hinten) zu sehen waren.
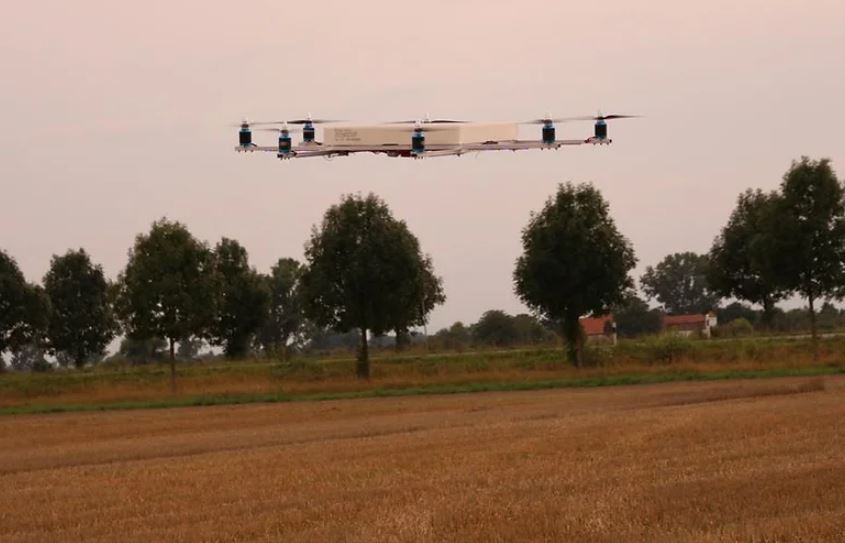
Es folgten die ersten Flugtest wo das Monster wirklich abhob. Das Problem beim fliegen (oder eher bei dem herum probieren) war, dass kein gutes Handling vorhanden war. Dafür verantwortlich sind die "berühmten" PID Werte. Ich schaffte es das Handling so zu verbessern, dass die Drohne fliegbar wurde, wenn auch eher schlecht.





Während dieser gesamten Zeit, vom Bau des Quadrocopters bis hin zum Bau des Octocopters, gab es immer mehr Angebote und kleine neue Firmen die Drohnen verkauften. Ganz vorne dabei die Apple Marke unter den Drohnen, DJI.
Ich konnte das Handling nicht weiter verbessern, da mir wissen fehlte zu den PID Werten. Desweiten waren die 500 kv (RPM/V) Motoren und die ESC´s viel zu groß, von den Leistungen, so dass ich mehr Akku bräuchte. Die Propeller drehten auch etwas zu langsam weil ich sie benutzte auf 11.1 Volt obwohl 14,8 Volt oder 18,5 Volt viel besser für das System wäre. Ich hätte aber auch auf 22,2 Volt gehen können bei den Brushless Motoren und dem 60 Ampere ESC System. Die Drohne war mit den Motoren auch sehr Laut in der Luft. Jetzt sah ich auch die vielen gut funktionierenden Drohnensysteme auf dem Markt. Ich hatte bei dem MultiWii Board Probleme bei der Installation der FailSafe für das GPS gestützte FlyBackToHome. Aus diesen gründen kam ich im Endeffekt auf den Schluss, alle Teile wie Akkus und Motoren zu verkaufen solange sie noch wie neu sind und wenn möglich bei dem nächsten System auf ein Flugcomputerboard von DJI zu gehen.
Kleiner Denkanstoß zur Leistung des Octocopters:
8 * 1136 Watt = 9088 Watt bei ca. 20 Volt macht das (Watt/Volt = Ampere) 454 Ah.
Will ich 10 min Vollgas fliegen brauche ich 76 Ah bei 20 Volt.
Da die Teile außerhalb der EU gekauft wurden, ich sie aber in Deutschland verkaufte, gab es fast keine finanziellen Verluste des Projekts. In der Zeit wurde auch meine Ebayaccount richtig aktiv. Ich verkaufte vieles und bestellte mir alle Gadgets und Teile die ich brauchte über Ebay. Bis heute hat sich da nicht viel geändert.
Ich wollte mir also wieder eine neue Drohne bauen, diesmal standen aber andere Vorgaben auf dem Programm wie Effizienz im Sinne der Flugzeit, Abfluggewicht und Transportgröße. Gute Fotos und Videos wollte ich aber immernoch schießen weshalb ich meine relativ neue Canon 700D Spigelreflex Kamera verkaufte und mir eine Kompaktkamera holte mit einem gleich großem Sensor. Die Sony a 6000.
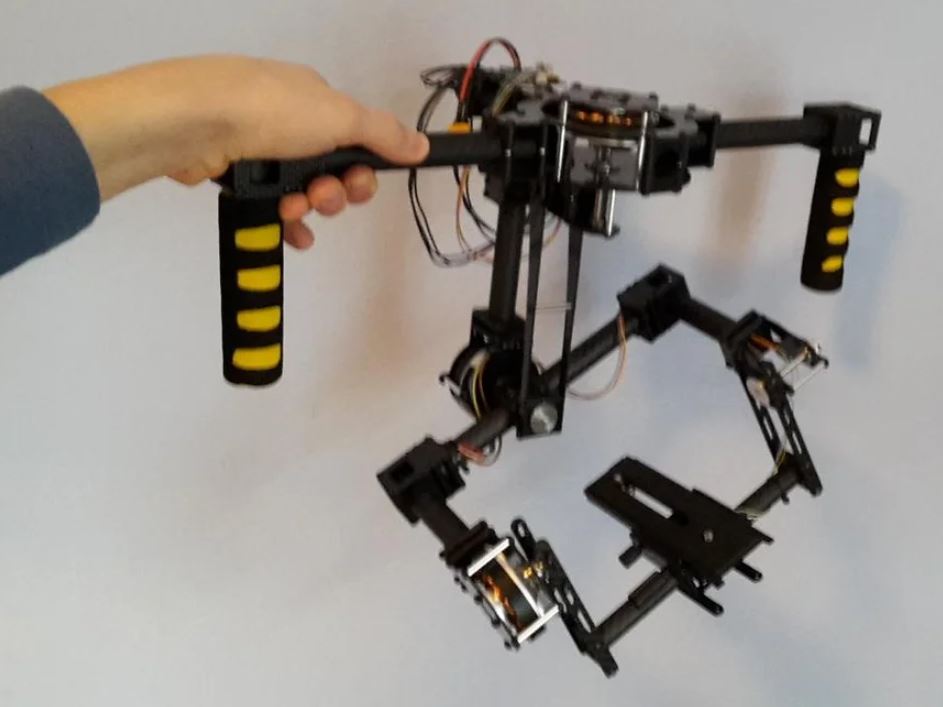
Das große 3 Axis Gimbal (gedacht für die Canon 700D) wurde wieder verkauft und ich kaufte mir ein kleineres 3 Axis Gimbal (mit dem SimpleBGC32 Board) für die Sony a 6000.
Projekt Hexacopter war nun gebohren.